











1. はじめに
現代の園芸や農業は、特に多くの地域で貴重な資源である水の使用を最適化するために、ますます自動化に依存しています。スマート灌漑コントローラ固定されたタイマーではなく、リアルタイムの土壌状態に基づいて灌水を自動化することで、無駄を減らし、過剰または不足灌水を防ぎ、植物の健全な成長を支援します。
本事例研究では、このようなシステムの動作モデル化に、UML状態機械図 (状態チャート図とも呼ばれる)。この図は、システムのライフサイクル、意思決定ポイント、および水分量の測定、タイムアウト、ユーザーの介入などのイベントに対する反応を捉えます。
この設計はPlantUML構文を使用しており、提供されたコーヒーショップの例と同様に、複合状態、ガード、アクション、エラー/回復経路を洗練された形でモデル化しています。
2. 問題提起と要件
家庭用庭園や小型温室向けの自動灌漑コントローラは、次を満たさなければならない:
- 通常は低消費電力のスタンバイモードで起動する。
- 定期的にスケジュール(タイマーによるトリガー)に従って起動し、状態を確認する。
- 次にセンシング状態に入り、土壌の水分量を読み取る(容量式または抵抗式センサー経由)。
- 水分量が30%(設定可能な乾燥しきい値)の場合、灌漑ソレノイドバルブを開くか、ポンプを起動することで開始する。
- 水分量が30%以上の場合、スタンバイ(水やりは不要)
- While 灌水中、継続的(または定期的)に湿度をモニタリングする。
- 以下の状況で灌水を停止し、バルブを閉じる:
- 湿度が80%(設定可能な湿り気閾値)→ 目標達成
- A セーフティタイムアウトが期限切れ(例:30分)→ センサーの故障時、浸水、配管破裂、電気的トラブルを防止する。
- 灌水停止後、シャットダウン状態に移行する。
- においてシャットダウン、手動確認(ボタン押下またはアプリコマンド)を待ってからスタンバイに戻る——これにより、ユーザーがシステムを点検したり、必要に応じて強制的に制御を変更できる。
- 障害を適切に処理する(例:センサー故障、バルブの閉塞)ために、エラー状態に移行し、回復オプションを提供する。
追加で望ましい動作(ここでは簡潔に):
- 特定の時間帯には灌水を行わない(スケジュール/タイマーで処理)。
- ログ記録や通知は、このコアステートマシンの範囲外である。
3. 使用された主要なステートマシンの概念
- ステート: 待機/スタンバイ、センシング、灌水、シャットダウン、エラー。
- 複合状態: 灌水状態には内部モニタリングロジックが含まれます(簡略化のためここでは平坦に保っています)。
- 遷移:
- イベント(タイマー、水分量の読み取り、タイムアウト)によって発動されます。
- 条件 [水分量 < 30%]、[水分量 >= 80%] によって制御されます。
- アクション: /open_valve()、/close_valve()、/notify_user() など。
- 初期/最終擬似状態: 開始/終了のための [*]。
- 自己遷移 および回復ループ。
4. PlantUMLにおける状態図
以下は、記述された動作を実装する完全な PlantUML コードです。コーヒーショップの例から導かれた規則に従っています(skinparam スタイリング、適切な場所での複合状態、[] 内のガード、/ を用いたアクション)。
@startuml
skinparam {
' 全体のスタイル
' 色
ArrowColor #333333
ArrowFontColor #333333
BackgroundColor #FFFFFF
BorderColor #333333
' 状態のスタイル
State {
BorderColor #005073
BackgroundColor #E6F5FF
FontColor #005073
}
}
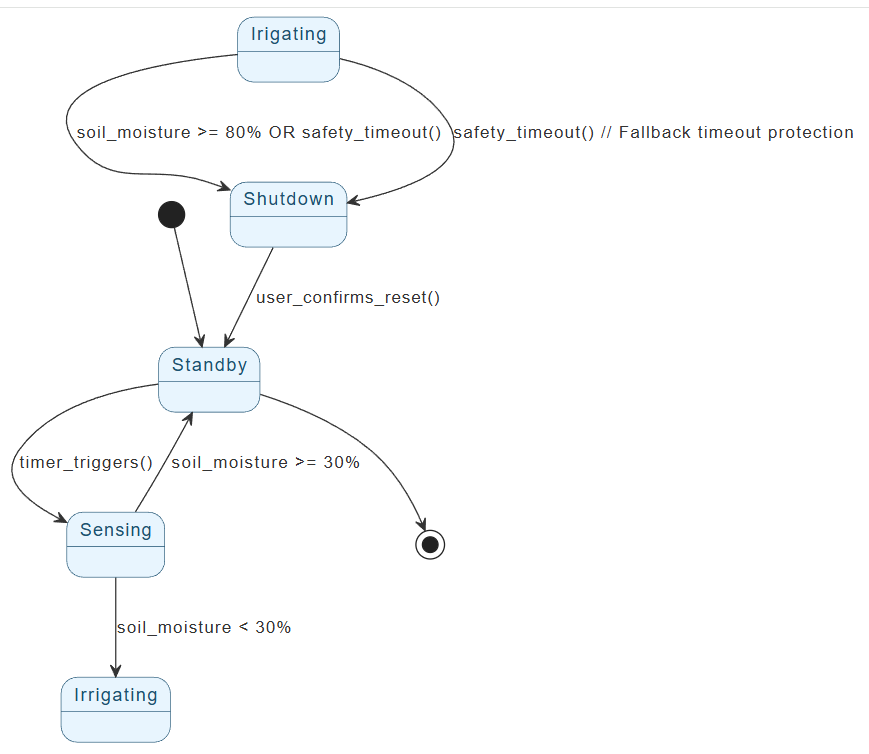
[*] --> スタンバイ
スタンバイ --> センシング : timer_triggers()
センシング --> 灌水 : soil_moisture < 30%
センシング --> スタンバイ : soil_moisture >= 30%
灌水 --> シャットダウン : soil_moisture >= 80% OR safety_timeout()
灌水 --> シャットダウン : safety_timeout() // フォールバックタイムアウト保護
シャットダウン --> スタンバイ : user_confirms_reset()
スタンバイ --> [*]
@enduml
図の説明
- スタンバイ — デフォルトの低消費電力/アイドル状態。
- センシング — タイマーによって発動される迅速なチェック;不要な灌水を回避します。
- 灌水 (複合)— 内部の 灌水 サブアクティビティを含むアクティブな灌水フェーズ。
- 目標水分量に達した、または安全タイムアウトが発生したときに終了します。
- シャットダウン — 灌水後の保持状態。自動化の再開には確認が必要(安全機能)。
- エラー — 故障の影響を制限する状態で、手動による復旧遷移が必要。
5. 設計の根拠と利点
- 水の節約 — 実際に必要となるときのみ灌水する(時間ベースではなく土壌の湿潤度に基づく)。
- 洪水防止 — 灌水状態からの二重の終了条件(湿潤度目標値 + タイムアウト)。
- ユーザーの安全と制御 — 異常停止後の手動確認により、潜在的な問題後に自動再起動を防止する。
- 拡張性 — 状態の追加が容易(例:雨検出, バッテリー残量不足, 冬モード)やしきい値の調整が容易。
- 低複雑性 — 可能な限り平坦に設計し、論理的なグループ化が明確さをもたらす場合(灌水中)のみ複合状態とする。
この設計は堅牢性、安全性、シンプルさのバランスを取っており、組み込みマイコン(Arduino、ESP32など)への実装に適している。
6. 結論
状態機械状態機械は、スマート灌水制御装置のような反応型制御システムをモデル化するのに優れた形式である。状態、イベント、ガード、アクションを明確に定義することで、エンジニアはコードを書く前からシステムの挙動、境界ケース、エラー回復について論理的に考えることができる。
上記のPlantUML表現は、ドキュメントとしても、実装のための設計図としても機能する。PlantUMLツールやオンラインサーバーを用いてレンダリングすることで、要件レビュー、コード生成、UML概念の教育に使えるクリーンでプロフェッショナルな図が得られる。
今後の拡張として以下の内容が考えられる:
- 天気APIとの統合(雨の予報がある場合はセンシングをスキップ)。
- ゾーンごとの湿潤度しきい値を設定した複数ゾーン対応。
- タイムアウトまたはエラー発生時にモバイルアプリへの通知。
この事例研究は、一見単純な自動化問題が、構造化された状態ベースのモデリングによってどれほど大きな恩恵を受けるかを示している。
- 3Dプリンタの状態機械に関する包括的なステップバイステップガイド:このガイドは、状態機械の概念を3Dプリンティングシステムに適用する、それらの運用論理と自動化経路を詳細に説明している。
- インタラクティブな状態機械図ツール:状態機械図の作成および編集に特化したウェブベースのツールで、GenAI機能を活用しているリアルタイムの動作モデリングに使用する。
- UMLにおける状態機械図の理解:このチュートリアルは、包括的な概要を提供し、UMLにおける状態機械図を用いたシステム動作のモデリングについて説明する。
- AIを活用したUML状態機械図の決定版ガイド:このリソースは、AI駆動のツールを用いて、UML状態機械図でオブジェクトの動作を正確にモデリングする方法について詳細に解説する。
- UMLで状態機械図を描くには?:このチュートリアルは、図を作成し、遷移を命名して、エンティティの履歴とイベント.
- Visual Paradigm AIで状態図をマスターする:自動料金システム向けガイド:このガイドは、AI強化型状態図を活用して、料金システムソフトウェアに必要な複雑な論理をモデリングおよび自動化する方法を説明する。
- 状態機械図チュートリアル:このチュートリアルは、記号と構文個々のクラスオブジェクト、ユースケース、および全体のシステムの動的動作をモデリングするために必要なものである。
- Visual Paradigm AI Suite:インテリジェントモデリングツールの包括的ガイド: この概要では、プラットフォームのAIチャットボットが技術的モデリングをサポートするステートマシンやその他の行動図を含む。
- Visual Paradigm – UMLステートマシン図ツール: 機能豊富なオンラインツールの概要で、アーキテクトが正確なステートマシンモデルを構築、編集、エクスポートできるように設計されたクラウドベースのインターフェースを使用して。
- ステート図クイックチュートリアル:数分でUMLステートマシンをマスターする: ステート図の作成と理解に役立つ初心者向けチュートリアルで、コアなコンセプトと実践的なモデリング技法に焦点を当てる.